
简介
“架构可定义为组件的结构及它们之间的关系,以及规范其设计和后续进化的原则和指南。简言之,架构是构造与集成软件密集型系统的深层次设计7“。也可称其为如何实施解决 方案的一个策略性设计(例如基于组件的工程标准、安全)和解决方案做什么的功能性设计(如算法、设计模式、底层实现)。
一个严格定义的层级架构可以实现功能分割,如任务再规划、路线优化、威胁规避等,这些功能可以高效地集成但性能会有所损失。
A. 开放控制平台(Open Control Platform,OCP)
开放控制平台(Open Control Platform,OCP)带有很多实时系统应用服务,可供控制工程师设计仿真。平台采用一种即插即用的设计,因此软件组件可以由不同单位在不同的 时间进行开发。此由波音公司领导开发,并基于波音Bold Stroke软件,中间件由华盛顿大学开发。
OCP包括:1)中间件基于实时CORBA (Copyright © 2002, Object Management Group, Inc.),提供一个通信网络将对象按client/server关系连接至组件;2)仿真环境;3)工具集成支持;4)控制应用程序接口 (Application Programmer Interface ,API)。OCP中间件采用C++编写,并提供一个publish/subscribe环境,可在主机或其他分布式计算机运行而不必修改源代码。 CORBA也可以提供一个命名服务器检索并存储指向移动组件的引用。此服务及其他如图2所示。波音使用了一个非常类似于CORBA的中间件在他们的F-15、F/A-18、AV-8B、T-45战斗机上,以及DARPA/USAF 无人作战飞机(UCAV)。
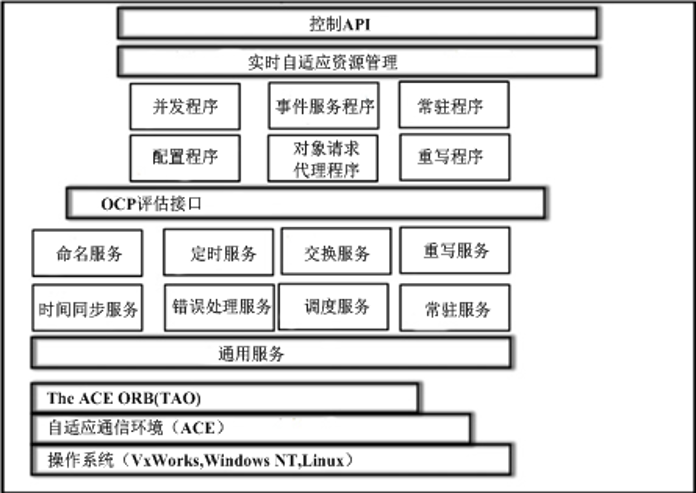
OCP层级结构(2003)
B. WITAS分布式UAV架构
Doherty等在2004年展示了“一种用于无人机实验的分布式架构”4, 以支持智能能力的开发。此分布式架构使用COBRA作为基础构建用于即插即用的软硬件环境,并且基于一种以反应为中心(reactive concentric)的软件控制方法。他们在瓦伦堡信息技术及自主系统实验室(WITAS)的无人机项目里使用了此分布式架构。WITAS是一个小型 -UAV直升机,用于监测和监视、紧急救援援助、摄影服务和测量。实验平台是一架Yamaha RMAX,长度为11.81 ft,最大起飞载荷为209 lbs。他们最大的设计挑战是控制系统有多个控制模式,可由架构激活以动态调用。此设计的软件架构包括一个慎思、反应和控制部分,因此不再是一个分层递阶 结构而是一个“以反应为中心”的架构。此反应中心的架构是一个高度分布、松散耦合、并发的架构,具有很多反应控制和并发运行的服务进程。CORBA是一个 将对象和组件连接起来的中间件,它通过一个通讯服务建立client/server关系。如图所示为WITAS架构的一些上层软件组件。

分布式UAV WITAS架构的软件组件(2004)
C. ARL/PSU智能控制器
Sinsley、Long、Niessner和Horn 于20085探讨了一种UAV软件的既智能又自主的基于行为的架构,Long等人9发 表了多个可用于无人机应用软件架构的全面历史回顾(1986-2002)(这些架构都缺乏学习能力)。2008UAV智能系统软件研究采用了宾夕法尼亚州 立大学应用研究实验室的智能控制器(IC)架构。此IC架构是一种基于行为(相对于基于模型)的架构,设计采用层级控制,由于从下至上的模式增加了功能复 杂性。它经过改进,以满足协作能力的要求。图4所示IC架构包含感知和响应模块。感知模块通过接收传感器的输入数据建立一个外部真实世界的表示。响应模块 使用感知模块建立的真实世界的认知生成一个规划,来执行特定任务。
共分为三个层级,顶层为任务管理层,它响应中间层行为(如攻击规划实施)的控制请求。底 层行为层生成输出指令(例如给自动驾驶仪、传感器、发送信息)。只要不发生冲突,可执行多个行为。Long 等9指 出,IC架构的一些关键特性包括应对意外情况、自动实时动态规划、态势感知、常见的多机协作体系结构,以及列入新功能的灵活性和在任何层级可选的人机互 动。测试模型是一个固定翼的SIG Kadet Senior (总重14lbs),具有稳定的飞行特性和缓慢的飞行速度。

ARL/PSU 智能控制器高层架构(2008)
D. SheLion UAV系统
Cai, G、Chen,B.和Lee, T.在《无人旋翼系统》6介 绍了一种行为式的架构,并用于设计他们的小型SheLion UAV,也可推广用于更大的UAV。他们的软件实现了以下功能,如硬件驱动、输入/输出、控制律实施、设备操作管理、多任务调度以及事件调度。他们称使用 了一种新型软件系统/行为架构,为新的模块和控制功能提供了灵活性和可扩展性。他们指出此架构可以普遍应用到无人机,包括机载软件系统和地面控制站的软件 系统。
机上软件系统使用一个实时操作系统(RTOS),其中包括一个飞行控制和一个视觉处理模块,基于航电系统的硬件配置如图所示。
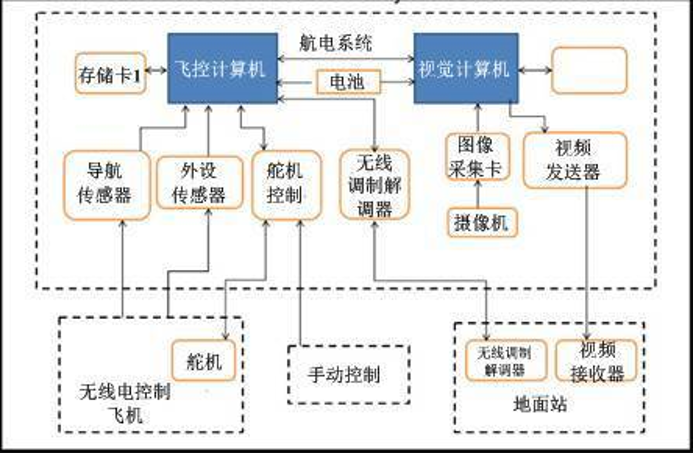
SheLion UAV系统的硬件配置 (2011)
飞行控制模块使用多线程框架,用于操作导航传感器和伺服作动器、日志记录飞行数据、与地面站通信以及实施自动控制算法。自动控制采用基于行为的体系结构8。SheLion飞行控制系统的框架如图所示
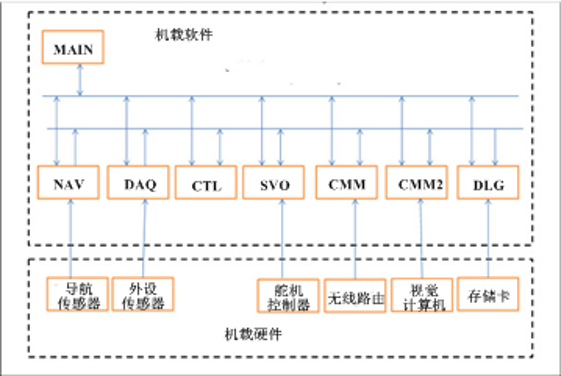
SheLion飞行控制软件系统框架(2011)
请登录后评论~